1. Müxtəlif struktur prinsipləri
İki modelin dizayn prinsipləri fərqlidir, nəticədə əyilmə sürgüsünün hər iki tərəfində sinxronizasiyanı təmin etmək üçün müxtəlif strukturlar yaranır. Burulma oxu əyilmə maşını, hər iki tərəfdəki silindrləri yuxarı və aşağı hərəkət etdirmək üçün sinxronizasiya mexanizmini məcbur edən bir burulma oxu yaratmaq üçün sol və sağ yelləncək çubuqlarını birləşdirmək üçün burulma oxundan istifadə edir, beləliklə burulma oxu sinxronizasiya əyilmə maşını mexaniki məcburi sinxronizasiya üsuludur. , və sürüşdürmənin paralelliyi avtomatik olaraq yoxlanıla bilməz avtomatik vasitəçilik.
Elektro-hidravlik sinxron əyilmə maşını sürüşmə və divar lövhəsində maqnit (optik) şkala quraşdırmaqdır. Rəqəmsal idarəetmə sistemi istənilən vaxt maqnit (optik) miqyaslı əks əlaqə məlumatı vasitəsilə sürüşmənin hər iki tərəfinin sinxronizasiyasını təhlil edə bilər. Səhv olarsa, ədədi idarəetmə sistemi sürüşmənin hər iki tərəfindəki vuruşu sinxronlaşdırmaq üçün mütənasib elektro-hidravlik servo klapan vasitəsilə tənzimlənəcəkdir. Rəqəmsal idarəetmə sistemi, hidravlik idarəetmə klapan qrupu və maqnit şkalası elektro-hidravlik sinxron əyilmə maşınının əks əlaqə qapalı dövrə nəzarətini təşkil edir.

2. Dəqiqlik
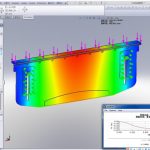
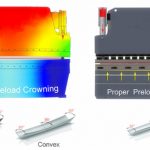
Sürgünün paralelliyi iş parçasının açısını təyin edir. Burulma oxu sinxron əyilmə maşını, real vaxt səhv rəyi olmadan sürüşmənin sinxronizasiyasını mexaniki olaraq saxlayır və maşının özü avtomatik tənzimləmələr edə bilməz. Bundan əlavə, onun qismən yükgötürmə qabiliyyəti zəifdir (burulma oxunun sinxron əyilmə maşını silindrləri hər iki tərəfdən yuxarı və aşağı hərəkət etdirmək üçün sinxronizasiya mexanizmini məcbur etmək üçün burulma oxundan istifadə edir. Əgər uzunmüddətli qismən yük burulma oxunun deformasiyasına səbəb olarsa .), elektro-hidravlik sinxron əyilmə maşını mütənasib elektrik vasitəsilə bir sistemdir. Maye klapan qrupu sürüşmə sinxronizasiyasına nəzarət edir və maqnit (optik) miqyas real vaxt səhvləri ilə bağlı rəy verir. Səhv olarsa, sistem kaydırıcının sinxronizasiyasını qorumaq üçün mütənasib klapan vasitəsilə tənzimləyəcəkdir.
3. Sürət
Maşının işində onun işləmə sürətini təyin edən iki nöqtə var: (1) sürüşmə sürəti, (2) arxa ölçmə sürəti, (3) əyilmə addımı.
Burulma oxu ilə sinxron əyilmə maşını yavaş işləyən 6:1 və ya 8:1 silindrdən, elektrohidravlik sinxron əyilmə maşını isə sürətli olan 13:1 və ya 15:1 silindrdən istifadə edir. Buna görə də, elektro-hidravlik sinxron əyilmə maşınının sürətli enmə sürəti və geri qayıtma sürəti burulma sinxron əyilmə maşını ilə müqayisədə xeyli yüksəkdir.
Burulma oxu sinxron əyilmə maşınının sürüşdürmə maşını aşağıya doğru hərəkət etdikdə, sürət sürətli aşağı və yavaşlama funksiyalarına malik olsa da, sürətli aşağı və geri dönüş sürətləri yalnız 80 mm / s-dir və sürətli və yavaş keçid hamar deyil. Arxa ölçünün işləmə sürəti cəmi 100 mm/s-dir.
İş parçasını bir neçə addımda əymək lazımdırsa, burulma oxu sinxron əyilmə maşınının hər bir prosesi ayrıca təyin edilməlidir və emal prosesi çox çətin olur. Bununla belə, elektro-hidravlik sinxron maşın kompüter vasitəsilə hər bir addımın prosesini təyin edə və saxlaya bilər və davamlı olaraq idarə edilə bilər ki, bu da əyilmə addımının sürətini xeyli yaxşılaşdırır və iş səmərəliliyini artırır.
Elektro-hidravlik sinxron əyilmə maşınının sürüşməsi aşağı düşdükdə, sürət sürətli aşağı və yavaşlama funksiyalarına malikdir. Sürətli enmə və geri qayıtma sürəti 200 mm/s-ə çata bilər və sürətli və yavaş çevrilmə hamardır, bu da istehsalın səmərəliliyini xeyli yaxşılaşdıra bilər. Eyni zamanda arxa dayağın işləmə sürəti 300 mm/s-ə çatır.
4. Güc
Öz dizaynına görə, burulma sinxron əyilmə maşını eksantrik yük altında əyilə bilməz. Uzun müddət eksantrik yük altında əyilirsə, burulma şaftının deformasiyasına səbəb olacaqdır. Elektro-hidravlik sinxron CNC bükmə maşınının belə bir problemi yoxdur. Sol və sağ tərəflərdəki Y1 və Y2 oxları müstəqil işləyir, ona görə də qismən yük altında əyilə bilər. Elektrohidravlik sinxron əyilmə maşınının iş səmərəliliyi iki-üç burulma oxu sinxron əyilmə maşınına bərabər ola bilər.
Əlaqədar məhsullar
 CNC Pres Əyləc Bükmə Maşının İş Prinsipi və Tərkibi
CNC Pres Əyləc Bükmə Maşının İş Prinsipi və Tərkibi- Nə üçün Pres Əyləc Bükmə Maşına Kompensasiya Sistemi əlavə edin
- Pres Əyləc CNC Sistemlərinin Müqayisə və Seçimi
- CNC Levha Bükücü E21 Sistemini bilmək üçün 4 addım
- CNC Levha Bükücü üçün əyilmə kompensasiyasını necə etmək olar
- Ən çox satılan hidravlik təzyiqli hidravlik atelye presi hidravlik pres ton hidravlik
- Çin 40 Tonluq Pres Əyləci
- Hidravlik Güclü Pres Maşının Təhlükəsiz İstismar Qaydaları
- WILA Bükülən Orta və Qalın Plitələrin Effektiv Həlli
- Pres Əyləc Bükmə Maşınlarının Ümumi Mexaniki Xətaları və Baxımı